2026-05-04

导语:本文针对工业场景的复杂特性通过深度辨析自动化(Automation A)自主化(Autonomy U)与智能化(Intelligence I)的内涵差异与内在联系结合所提出的场景模型的解构方法 构建了基于 AUI 框架的能力评价模型
在人工智能(AI)与新一代信息技术加速发展的背景下,有必要推动AI与制造业全流程深度融合,加快突破工业智能关键技术,构建以企业生产要素创新配置为核心的智能制造新模式。当前,AI与制造业的融合正从初期的“技术堆叠”转向以业务场景为核心的“深耕应用”。企业不再单纯追求算力投入,而是致力于以场景为牵引,系统整合数据、算法与流程,构建可量化、可复制且能切实提升效益的系统能力。
在标准与方法层面,数字孪生技术提供了关键支撑。ISO 23247《自动化系统与集成—面向制造的数字孪生框架》系列标准通过结构化描述制造要素,确立了“按场景落地”的工程路径;美国国家标准与技术研究院(NIST)在此基础上提出了实施用例与可迁移设计流程,有效降低了工程实践的不确定性。
在实践层面,现有研究已验证“场景化设计—仿真融合—决策优化”的可行性。通过融合仿真模型与实时数据构建自适应系统,可实现“感知—决策—执行”闭环;部分研究强调以用例为牵引的框架化表达,这对于对齐跨部门项目目标至关重要。国内研究亦指出,将场景视为需求、技术与环境的耦合系统,能为企业转型路径提供更具操作性的理论依据,而基于“人—机—物”一体化的场景架构,则能有效支撑复杂环境下的业务重构。
文献提出了一种典型的模型驱动的面向场景的分析框架,如图1所示。该框架以产业链建模为核心方法,通过分层、多要素的手段,从性能、行为与结构三个视角对系统进行全面分析与评价。
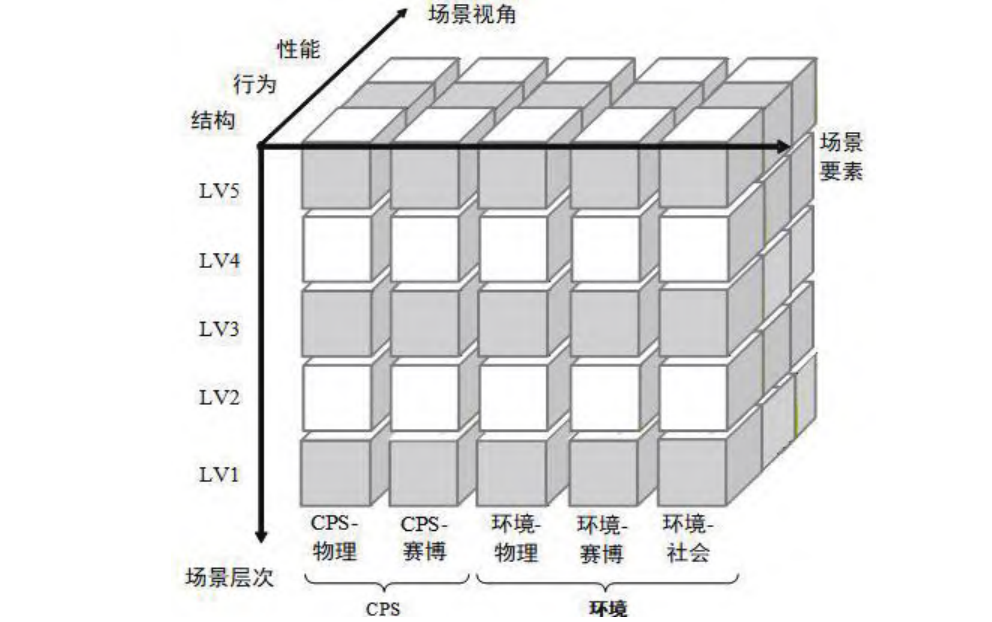
图 1 面向场景的模型管理架构
在工业场景中,“使用AI”并不等同于“实现了智能化(Intelligence, I)”。例如,自动化(Automation, A)关注技术对人类功能的替代程度与层级;自主化(Autonomy, U)强调系统无干预完成任务的能力,其核心不在于是否采用AI算法,但二者均是数智化转型当中的重点。
必须指出,自动化并非天然弱于智能化。在实时控制域,规则明确的自动化闭环往往比智能算法更具稳定性;盲目将智能算法视为“高级”,反而可能引发误用与系统性风险。因此,需从三个维度重构评价概念。(1)自动化:衡量技术替代程度与控制权配置;(2)自主化:衡量复杂环境下对人的依赖度与闭环自持能力;
(3)智能化:衡量感知推理、泛化适应及可信治理[参考美国国家标准与技术研究院AI风险管理框架(NIST AI RMF)]的充分性。
因此,为了避免陷入“盲目追求高精尖”的误区,建立一套严谨的A/U/I评价范式,明确技术与场景收益的因果映射,是当前亟待突破的瓶颈。场景评价虽包含主观权衡,但必须通过显式化与结构化的方式加以规范,否则结论将缺乏可比性。如图2所示,评价元模型由“谁在评”(评价主体)、“评什么”(评价客体与关注点)、“用什么评”(指标体系与证据源)、“怎么评”(评价方法/分析方法与参数)、“评出什么”(结果及其解释)五要素构成。这一逻辑与仿真领域的验证与确认(V&V)一致,即依靠文档化的证据链而非直觉来保障可信度。同时,借鉴ISO/IEC 25010:2023《系统与软件工程系统与软件质量要求和评价》等标准中的术语,可有效提升评价的跨系统复用性。
针对制造业转型中A/U/I概念混淆、指标错位及结果不可比的痛点,本文提出了一套面向场景模型的统一评价框架。首先,辨析了三类能力异同,构建评价指标体系;其次,基于赛博—物理—社会系统(CPSS)要素与认知活动分解建立场景映射,刻画跨层级、跨组织的协作互操作机制。在此基础上,本文构建了“指标—证据—方法—结果”一体化的评价元模型,明确了“单元—层次—场景”三级评价路径,并通过工程机械远程运维案例进行验证。该框架能够与ISO 23247:2021《自动化系统与集成面向制造的数字孪生框架》等数字孪生标准体系对齐,为场景化评价提供了可落地的理论底座。
一、自动化、自主化和智能化
在场景化数智化转型的语境下,A/U/I之所以成为场景化转型的关键维度,因其直指工业系统演进的三大核心命题:任务承担主体、独立运作边界以及能力的适应性与可信治理。
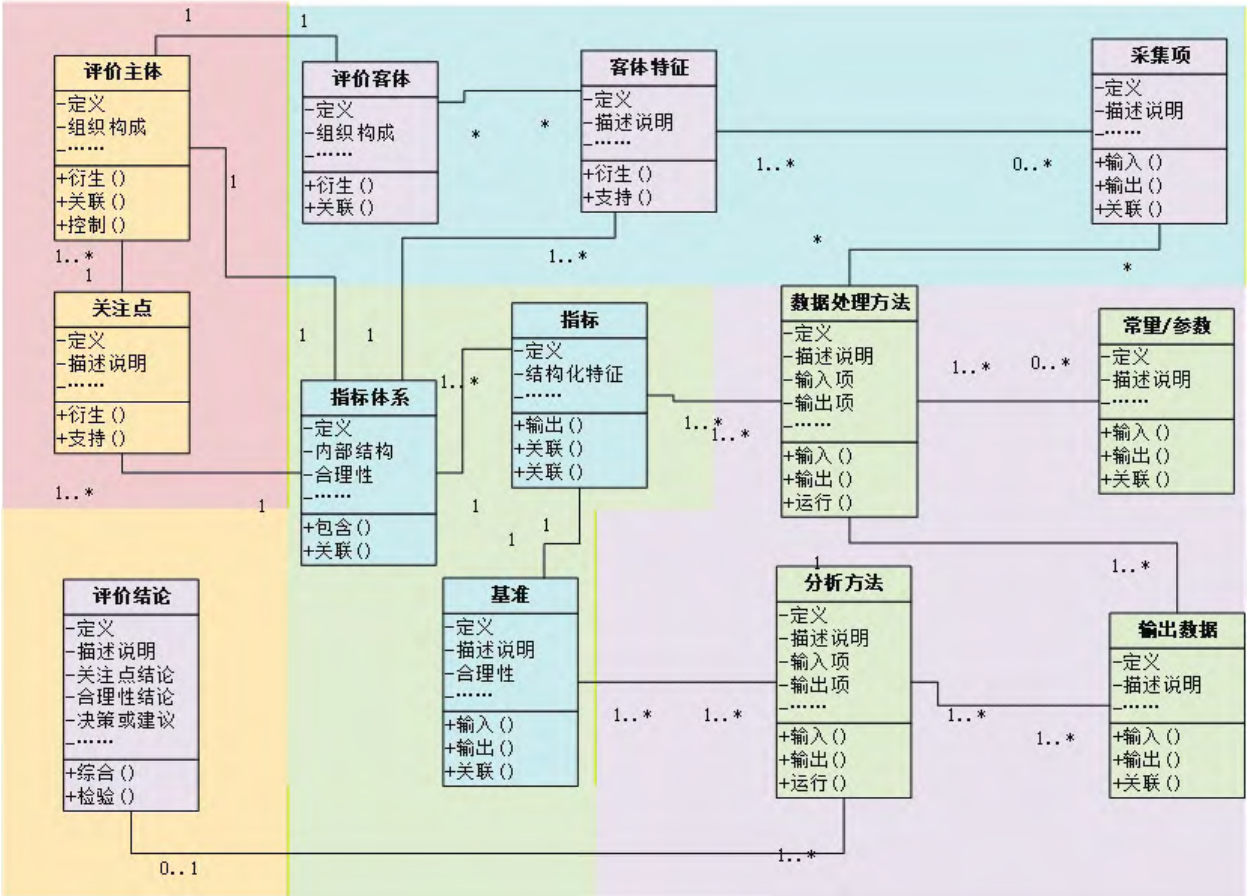
图 2 评价元模型
A:聚焦技术对“人”的替代程度及运行稳定性。基于经典人机功能分配框架,自动化涵盖从信息获取、分析、决策到动作实施的四类功能替代,并在各环节呈现层级差异。
U:聚焦系统在特定复杂度下无需人工干预的闭环能力。依据ALFUS框架,自主性并非孤立指标,而是结合任务复杂度、环境难度及人机交互等多维因素共同刻画。
I:聚焦系统的泛化适应能力与治理属性。一方面,锚定基于共享知识库的监控—分析—规划—执行(MAPE-K)循环框架,确立以知识(K)为基础的自适应闭环;另一方面,对标NIST AI RMF,通过“治理—映射—度量—管理”的证据链,确保智能系统的可审计与可信度。A/U/I三者既非完全正交也非重合,其能力的解耦组合在治理与人机信任层面具有重要意义。
典型的非一致性组合如下。(1)高智能、低自主(High I/Low U):系统具备卓越的预测与诊断能力,但因安全或合规要求,关键决策仍需人工确认。这体现了“智能决策支持”对责任归属的治理约束。(2)高智能、低自动(High I/Low A):系统能生成高质量方案与解释,但缺乏自动执行链路,需依赖人工实施。(3)高自动、低自主(High A/Low U):执行链高度自动化且可规模化,但缺乏应对复杂环境的自适应决策能力。
因此,必须将三者视为独立的评价维度,在场景建模中显式刻画其交互关系,以避免设计与治理层面的指标误配。如图3所示,理想的场景化转型应结合自身特征(功能、技术、人员)实现A/U/I的协调发展。
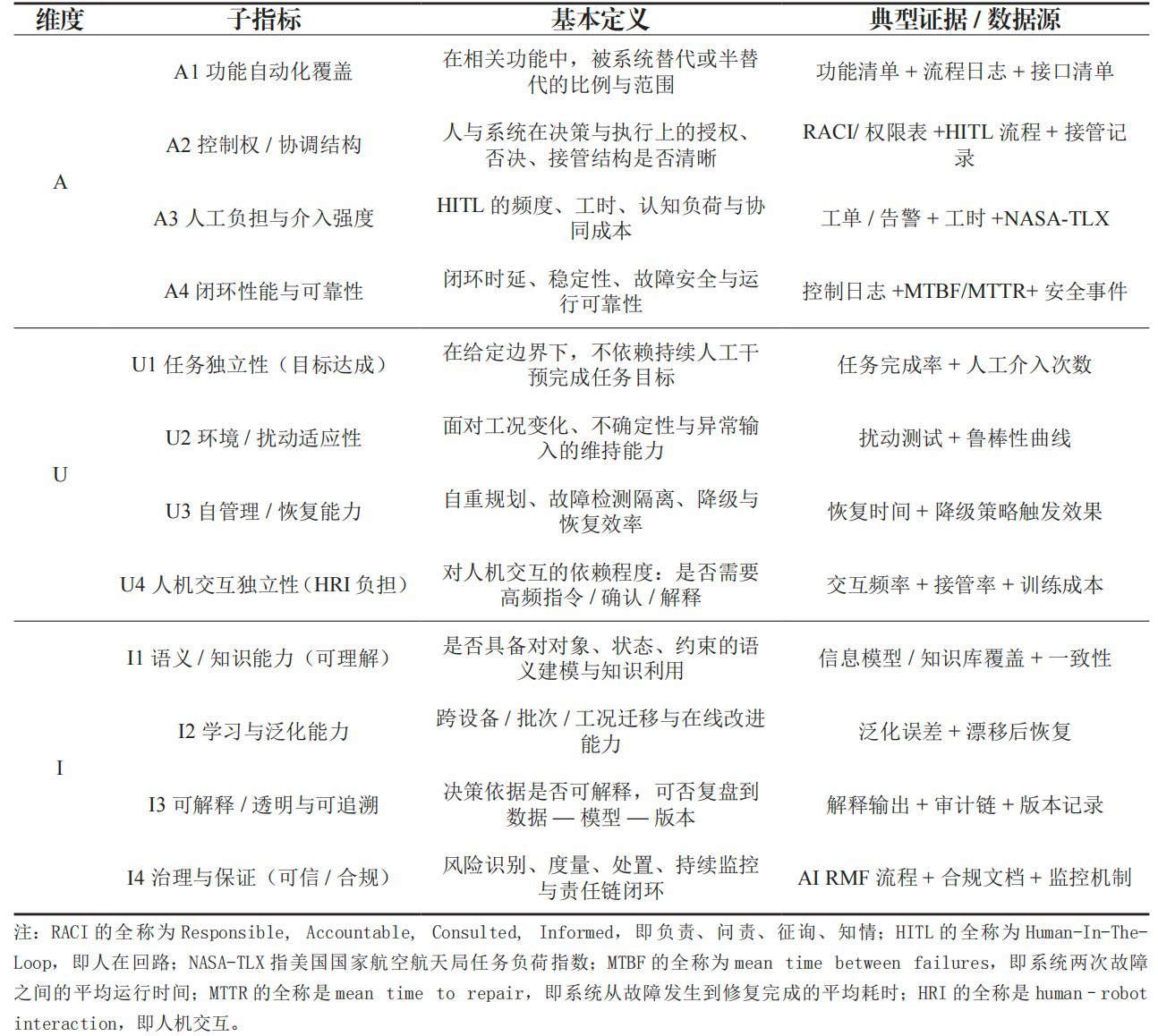
为了确保跨场景的可比性与落地性,本文构建了“维度—子指标—证据”三级评价体系(表1):一级为A/U/I三维能力,二级为12项核心子指标,三级为日志、工单、文档等可观测证据。A的核心在于“功能替代+控制权结构+人介入负担+闭环时序质量”;U的评价关注任务复杂度、环境难度、人机交互等问题;I的核心不在“是否用了AI技术”,而在于学习、适应、可信等方面,每个评价指标都具有对应的证据和数据源作为评价采集项。
二、场景视角与典型场景模型
工业场景本质上是CPSS的结构耦合。为了实现可度量的“行为耦合”,本文将关键行为抽象为“感知—记忆—决策”三类认知活动。这一划分与OODA、MAPE-K及认知循环等经典闭环框架在结构上高度一致。在此基础上,本文建立了“结构—行为”映射:感知、记忆和决策分别由赛博系统(CS)、社会系统(SS)或人机物融合体(CPS/SPS/CPSS)主导。需要强调的是,物理系统(PS)不能单独主导认知活动,纯机械/控制回路不属于本文自主化与智能化的评价范畴。为了支撑A/U/I的差异化评价,本文对三类认知活动进行了广义界定。
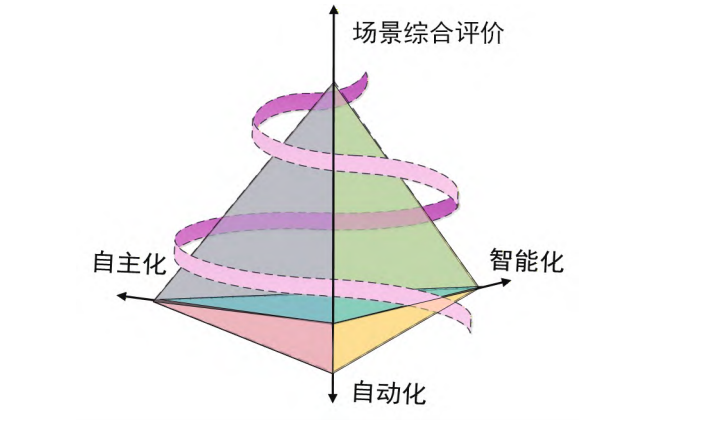
图 3 自动化、自主化和智能化语境下的场景评价
表 1 场景 A、U、I 的评价指标
感知:不限于传感器采样,而是对输入信息进行组织、解释与意义建构的全过程;涵盖状态估计、异常检测、语义对齐及在线学习触发等;强调从信息到表征的全过程。
记忆:不限于静态存储,而是信息暂存加工与长期知识沉淀的结合;涵盖运行上下文、事件日志、知识库及可追溯的证据链;强调表征的沉淀与可复用性。
决策:不限于指令下发,而是策略选择与动作执行的控制闭环;涵盖规划调度、策略切换、约束满足及降级机制;强调从表征到行动及其控制闭环。
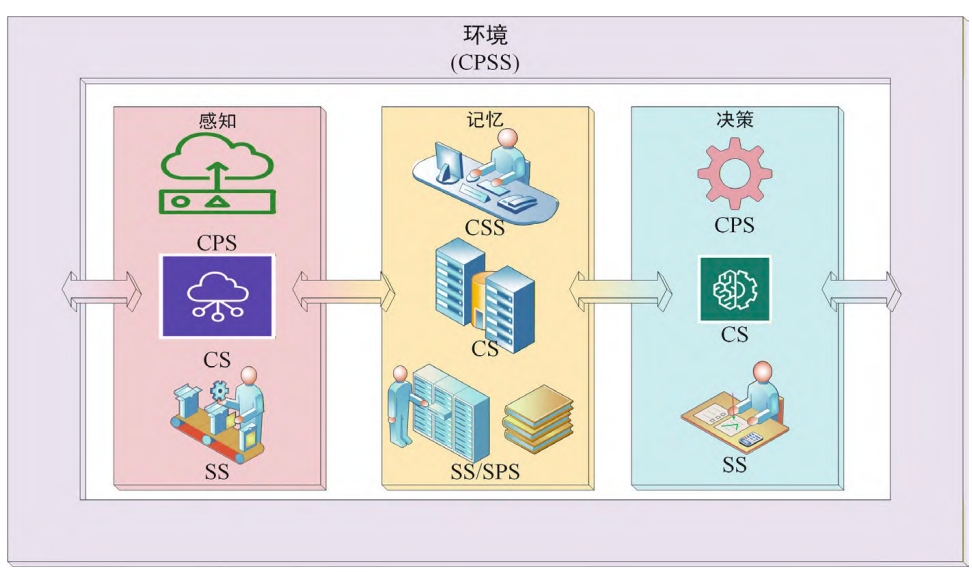
图 4 场景行为和结构的映射关系
如图4所示,本文将工业场景抽象为CPSS环境中的“认知—控制”结构,显式标注了由不同要素(C/PS/SS)主导的感知、记忆与决策模块。同时,在层级划分上(图1),本文在ISO/IEC 6226《企业控制系统集成》标准(LV0~LV4)基础上增设LV5,专门用于处理企业间集成、供应链协同及生态级治理问题。
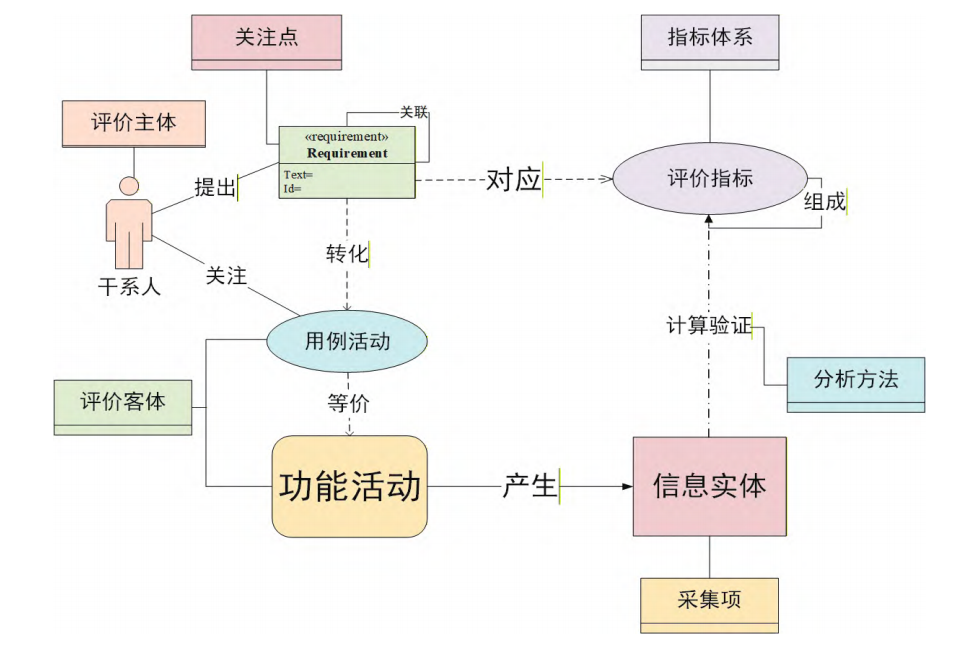
图 5 基于场景建模的评价思路
表 2 数智化转型中典型的工业场景
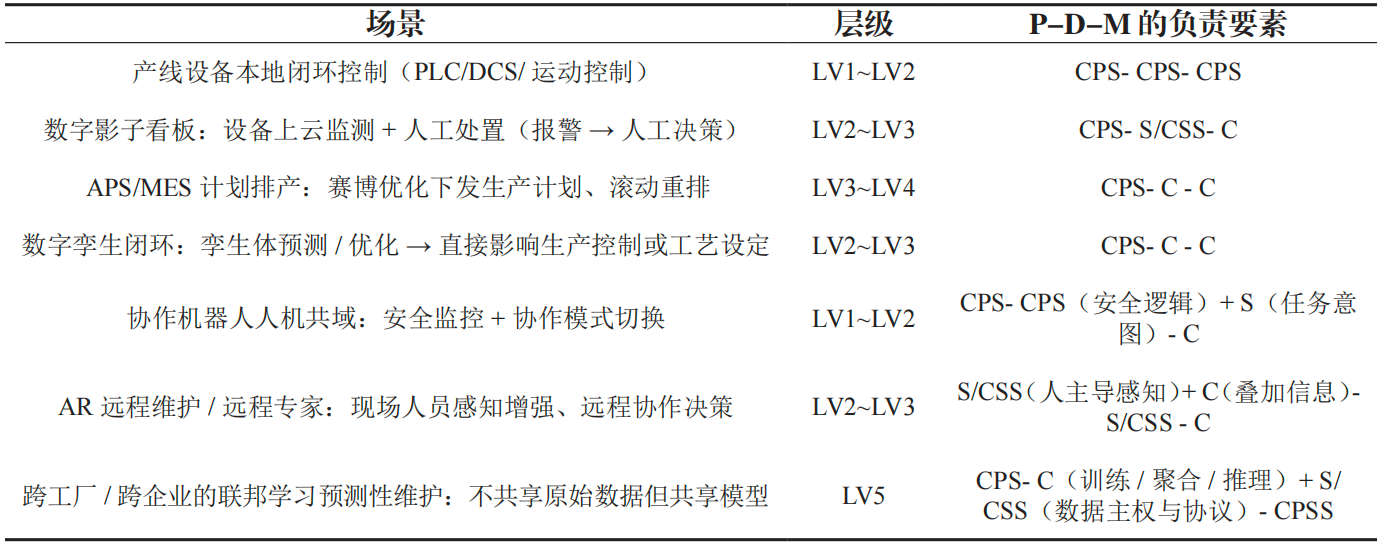
根据要素—功能活动的映射关系,可以得到如表2所示的数智化转型中的典型场景。
场景1是产线设备本地闭环控制主要发生在LV1~LV2,全环节往往由现场信息物理系统(CPS)整体主导,体现“高实时、强确定、强可重复”的基准型闭环。
场景2是数字影子看板(设备上云监测+告警+人工处置),常见于LV2~LV3,物理侧CPS提供数据感知,但关键处置决策由人/组织流程(CSS/S)完成、记忆沉淀在赛博系统(工单/知识库/平台数据库)中,符合数字影子概念:物理→数字自动更新,但缺少自动的双向闭环”的区分逻辑。
场景3是高级计划与排程系统(APS)/制造执行系统(MES)计划排产与滚动重排,大多属于LV3~LV4,感知依赖CPS的执行数据底座,而决策与记忆主要由赛博优化器与信息系统承担,形成“赛博推理/优化强,但执行常受治理约束”的决策型场景。
场景4是数字孪生闭环场景,进一步将模型预测/优化结果回灌到工艺设定或控制参数,关键差异在于具备自动化的双向耦合与可执行闭环。
场景5是协作机器人人机共操作,主要位于LV1~LV2层级,决策天然分裂为安全层(CPS依据安全监控实时触发/手动引导等协作操作模式)与任务层(SS/CSS基于意图与节拍进行临场调整),而“协作模式/阈值”等记忆通常由赛博侧系统维护。
场景6是增强现实(AR)远程维护/远程专家处理,常见于LV2~LV3,以赛博侧结构化信息叠加增强人的广义感知与诊断,但关键决策仍由社会系统(现场人员/远程专家)协同完成,记忆落在工单与知识资产中。
场景7探讨跨工厂/跨企业联邦学习预测性维护,可视作LV5类协作:各工厂CPS保持数据在地,赛博侧完成训练/聚合/推理,而“数据主权、协作协议与责任边界”作为社会要素进入治理链,最终将“分布式模型资产”作为跨组织的共享记忆予以持续演化。
三、场景模型驱动的系统评价
如图5所示,参考评价元模型,本研究将评价刻画为一条从主观关注点到客观证据的可追溯链路。评价主体提出的关注点首先被形式化为验证需求,进而分解为可观测的功能活动,明确系统行为边界。这些活动在运行中产生日志、事件等信息实体,为指标计算提供数据基础。该结构不仅将评价从主观观点转化为客观证据链,也体现了需求工程中“需求—实现—验证”的追溯思想,与通用质量模型中“指定—测量—评价”的逻辑闭环相一致。
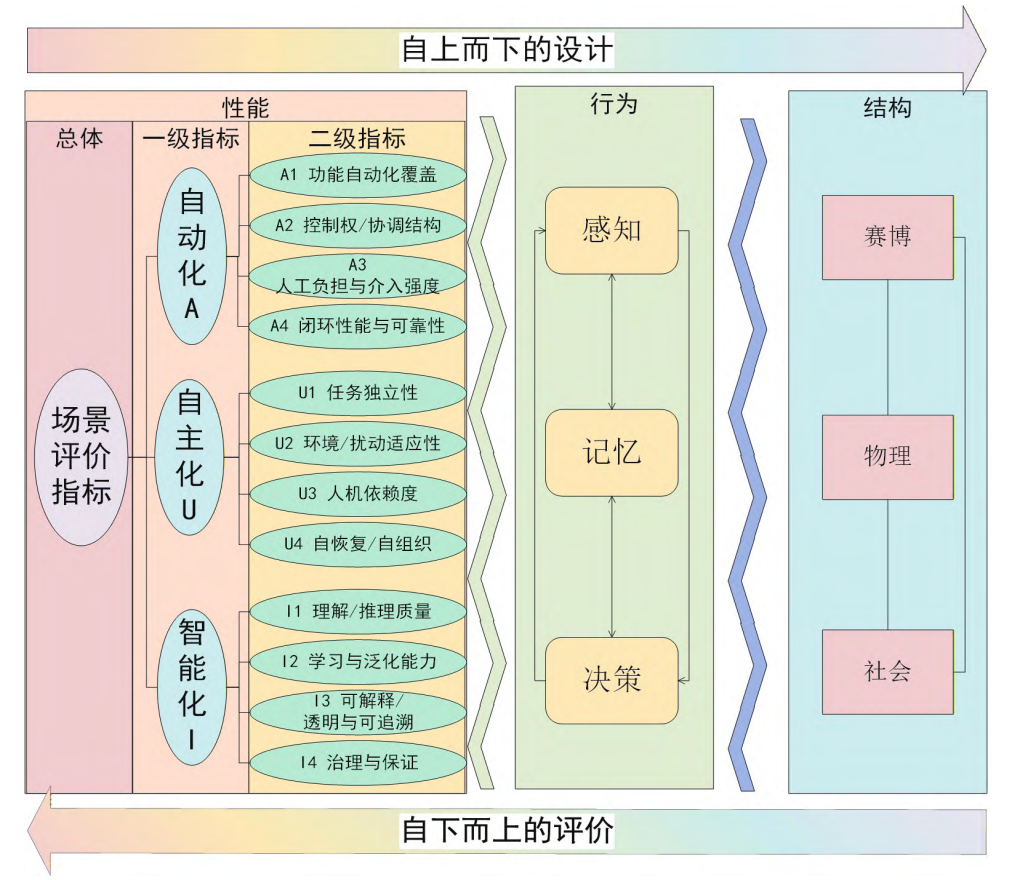
图 6 基于“性能—行为—结构”三视角的评价方法
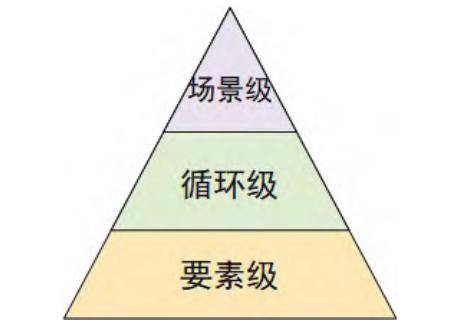
图 7 数智化转型的评价问题
承接上述逻辑,图6进一步将该链路结构化,构建了“指标—行为—结构”的三重映射框架。具体而言,框架左侧将评价目标细化为A/U/I三维指标体系;中部将场景机理抽象为“感知—记忆—决策”认知闭环;右侧则将行为闭环映射至赛博—物理—社会要素结构。如图6所示,该框架通过“自上而下的设计”与“自下而上的评价”双向路径,将抽象流程转化为可执行的评价范式:前者负责从场景目标分解出功能分工,后者则通过底层结构与行为产生的数据证据聚合形成指标评分,从而同时确立了指标选取的理论依据与证据获取的实证路径。
如图7所示,数智化转型的评价逻辑遵循“要素—循环—场景”的自底向上层级:底层要素级关注算法精度、算力资源等技术指标对具体功能的支撑作用;中间循环级聚焦子系统的运行状态,如闭环稳定性与实时调度能力;最高场景级则考核多闭环集成后的整体表现,核心在于综合效益与系统鲁棒性。
表 3 不同要素主导环节下的核心指标
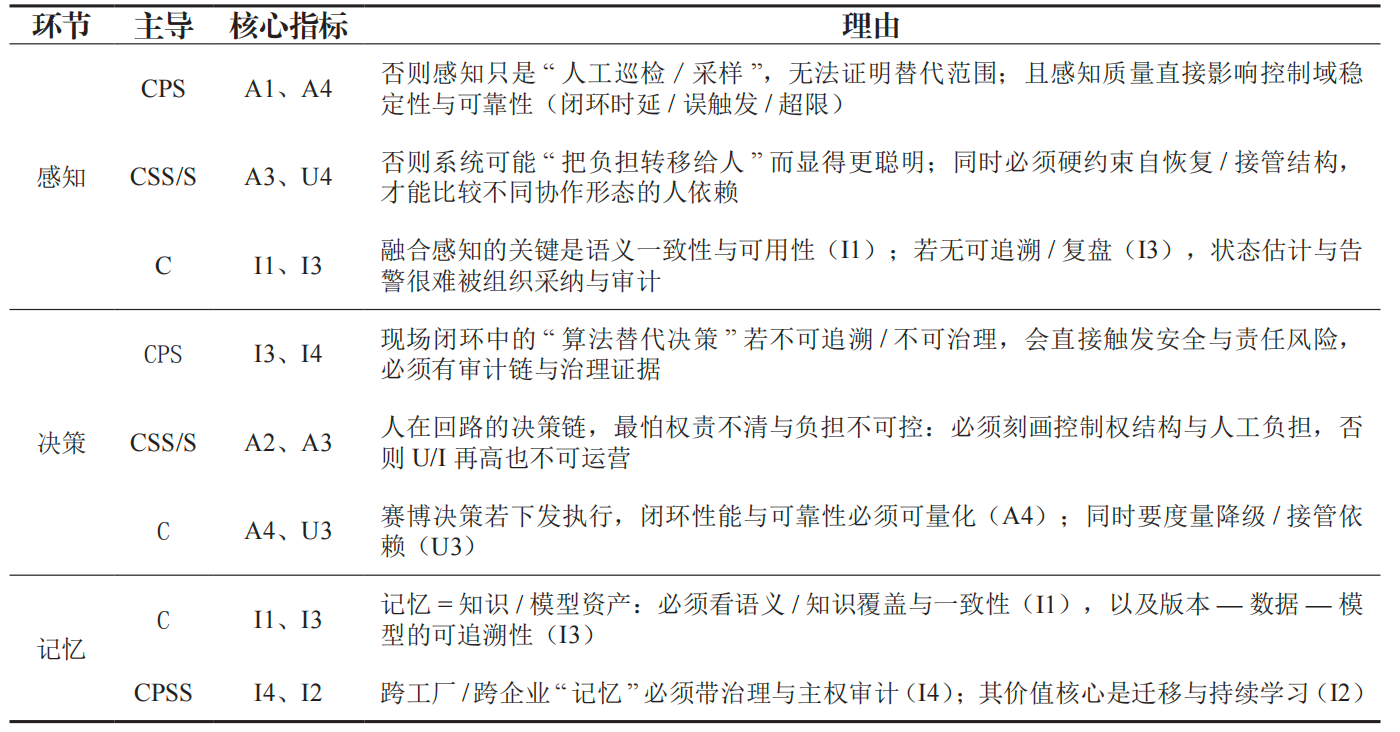
在CPSS场景的具体评价中,本文提出“主导要素决定证据类型”的原则,即依据感知、决策、记忆环节的主导者差异,确定A/U/I指标的“硬约束”(表3)。具体而言,在感知环节,若由CPS主导,必须考核A1(覆盖范围)与A4(闭环性能),以防止感知退化为人工抽样并引发控制风险;若由人(CSS/S)主导,核心在于量化A3(人工负担)与U4(交互独立性),防止系统通过隐性转移成本来“伪装”智能[33];若由赛博(C)主导多源融合,则需聚焦I1(语义一致)与I3(可追溯),确保感知的可审计性。
在决策与记忆环节,该原则同样适用。对于决策环节,CPS主导时必须将I3与I4(治理与保证)设为必选项,通过审计链规避自动决策的责任风险;人主导时需优先明确A2(控制权)与A3以厘清权责;而赛博主导下发指令时,必须量化A4与U3(自恢复)。对于记忆环节,赛博主导的单点资产侧重I1与I3的语义与版本管理,而CPSS主导的跨组织记忆则必须关注数据主权下的I4与I2(迁移学习)能力。综上,该规则将自动化分级、自主化边界与AI治理闭环有机整合,构建了一条“组合类型—必选指标—证据来源”的可审计评价链。
表 4 不同层级的评价指标倾向性
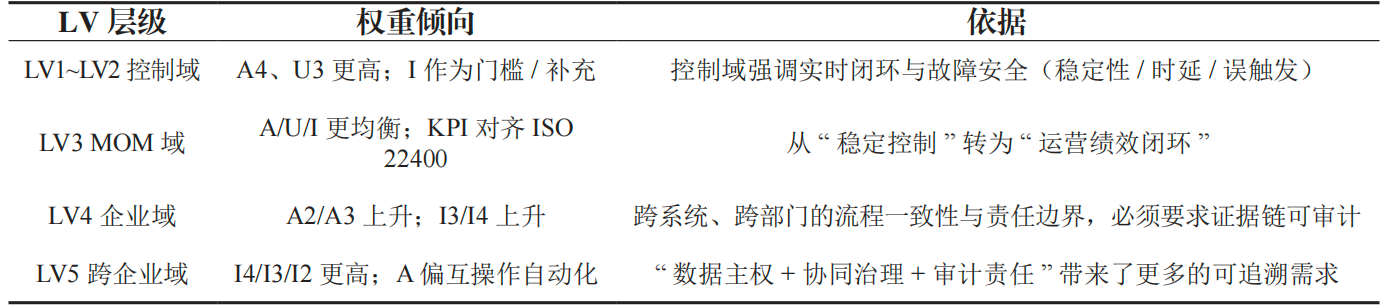
表 5 场景维度评价指标倾向性

当聚焦层级内的闭环评价时,核心在于识别不同层级关注点的侧重与取舍,而非单纯考查具体技术类型。如表4所示,评价逻辑随层级演进而呈现显著差异。在LV1~LV2控制域,评价呈现“A4/U3主导,I为门槛”的特征。由于控制闭环属于典型的“高实时+强约束”系统,其成熟度证据主要源于控制日志与可靠性记录(如闭环时延、MTBF、故障安全等对应A4)以及异常边界内的自恢复能力(对应U3)。智能算法在此仅作为优化手段,若其引入不可审计或漂移风险,反而会降低系统可用性,因此I类指标主要作为门槛项存在。
随着层级上升至LV3[制造运行与管理(Manufacturing Operation & Management,MOM)域],系统目标从“稳定控制”转向“运营绩效闭环”,A/U/I指标权重趋于均衡,评价重点在于与工单、质量及资源等管理对象的绩效对齐。进而上升至LV4(企业域)时,A2/A3(控制结构)与I3/I4(治理追溯)的重要性显著上升。此时的关键在于跨系统、跨部门的流程一致性与责任边界,评价必须明确纳入控制权结构(如审批与接管的必要性),并要求具备可审计的证据链,以规避合规与资产损失风险。
最后,在LV5(跨企业域),评价重点转向I4/I3/I2,而A演变为“互操作自动化”。由于跨企业协作涉及数据主权与协同治理的强约束,自动化不再体现为内部流程替代,而是接口与语义的互操作性。相应地,I类指标成为核心主轴:系统不仅需要具备持续学习与迁移能力(I2),还必须建立严苛的可追溯(I3)与治理闭环(I4),以应对策略冲突与审计责任。
当评价视角上升至跨越要素与层级边界的宏观场景时,关注点不再局限于具体的技术互操作细节,而是转向端到端的集成绩效与服务收益。具体体现在三个核心维度:首先是端到端绩效,其中自动化(A1/A4)决定执行链的效率均值与产能稳定性,自主化(U)保障复杂扰动下的目标达成率,而智能化(I1/I2)则通过决策优化贡献超越基准的业务增益。其次是协同代价,该指标通过A2/A3显式化权责成本,解释因控制权不清导致的协同等待,同时结合U3/U4的接管频度与I3的可解释性,量化人工介入与信息不对称带来的摩擦成本。最后是尾部风险与治理,依据NIST AI RMF等框架,I4提供了合规响应与回滚的证据链,配合U3/U4的自恢复机制与A4的可靠性底座,共同构成了系统在极端工况下的生存能力边界。场景维度评价指标倾向性见表5。
需要指出的是,鉴于工业场景的高度异质性与技术演进的快速性,本文并未限定具体的评价算法[如层次分析法、模糊评价或数据包络分析(DEA)等],而是侧重于构建通用的指标分类框架。该框架的价值在于通过A/U/I的分类逻辑,帮助决策者跳出技术细节,从根源上验证“场景需求的必要性”与“能力配置的合理性”,从而为不同场景下的指标遴选与方法适配提供理论指引。
四、案例分析:工程机械远程运维
鉴于工业场景的复杂性,本文选取工程机械远程运维作为典型案例,重点从评价视角展开探讨。该场景旨在利用网络与AI将现场运维转变为“远程诊断+精准派工”模式,以实现降本增效,其核心逻辑的映射表现:远程故障诊断构成感知模块,运维策略执行构成决策模块,而历史数据与专家经验库支撑记忆模块。
将故障处理链拆解为功能单元时,不同主导要素决定了评价侧重:现场设备与网关作为CPS主导的感知单元,需重点考核A1与A4,以验证技术替代范围与闭环可靠性;平台侧作为赛博主导的记忆单元,需利用I1与I3验证推理质量与可追溯性;实时派工与备件流程调整作为CSS主导的决策单元,需应用U1–U3验证任务边界内的鲁棒性。特别地,在专家审核环节,必须引入A2与A3以显式刻画控制权结构与人工负担,防止系统将性能提升建立在隐性增加人因成本之上。工程机械远程运维案例服务场景如图8所示,案例所涉及的指标见表6。
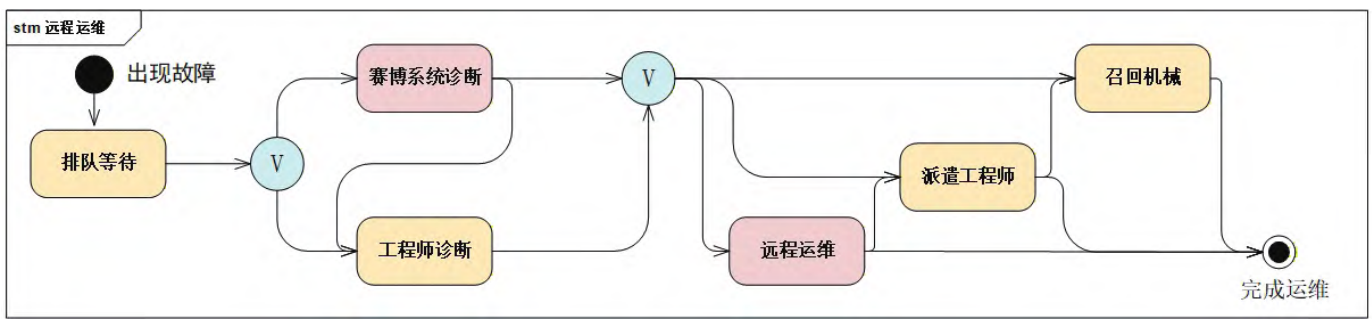
图 8 工程机械远程运维案例服务场景
表 6 工程机械远程运维案例所涉及的指标
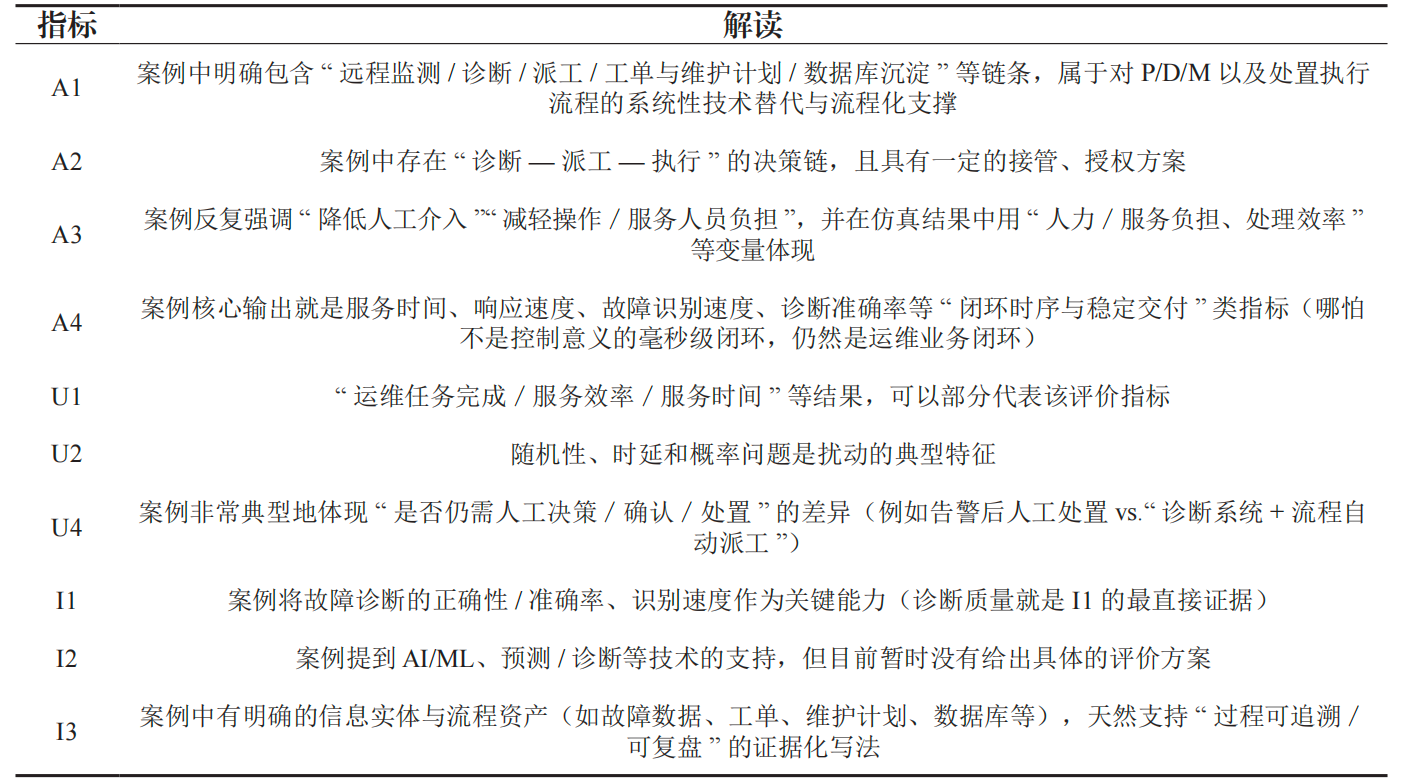
置于IEC 62264-1《企业控制系统集成第1部分:模型和术语》分层语境下,评价重心随层级演进发生偏移。在LV1~LV2设备控制层,权重向A4与U3倾斜,侧重时延与稳定性;在LV3运维层,评价对齐ISO 22400《自动化系统与集成—制造运营管理用关键绩效指标(KPI)》架构,关注工单效率;当上升至LV4~LV5跨组织服务网络时,协同成本(A2/A3)与治理证据链(I3/I4)成为优先级最高的指标,以应对接口一致性与合规治理的挑战。而在场景宏观层面,端到端系统的绩效提升源于A、U、I三轴的协同驱动:端到端绩效直接反映A4的可靠性与U1/U2的扰动适应能力;协同代价对应A2/A3的权责结构与U3/U4的人机依赖;尾部风险治理则依赖I3/I4的可追溯性,并可参考NIST AI RMF组织异常工况下的合规证据。综上所述,本案例证实了基于A/U/I指标体系的评价范式能够有效识别不同层级的技术瓶颈与协同摩擦,为数智化转型的架构调优提供了标准化的理论工具。
五、总结和讨论
本文系统辨析了自动化(A)、自主化(U)与智能化(I)的逻辑异同,构建了从底层技术结构到高层系统行为的映射框架,并提出了一套面向工业场景协同的多维评价体系。案例分析证实,该体系在衡量交付绩效、协同代价及尾部风险治理方面具有显著的有效性,明确A/U/I的分工集成关系确为破解复杂系统评价难题的关键。
展望未来,面对日益提升的工业系统复杂度,基于模型的评价方法将成为转型核心引擎。后续研究将致力于引入实时数字孪生数据与深层因果推理模型,推动评价从“静态评估”向“动态演进”跨越,从而为不确定环境下的决策优化与系统进化提供持续的理论支撑,助力工业数智化转型迈向深水区。
原文刊载于《数字化转型》2026 年第4期 作者:清华大学自动化系 瞿盟津 王子昂 李清
暂无评论,等你抢沙发

对话侯康选: 从“抢修”到“预防”,智能IT运维的正确打开方式
中小企业数字化转型框架与总路线图