导语:工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置具有一定的自动性可依靠自身的动力能源和控制能力实现各种工业加工制造功能
工业机器人的组成
以当前工业中应用最多的6轴工业机器人为例,从外部设备来看,由三个部分组成:机器人本体、控制柜、示教器。
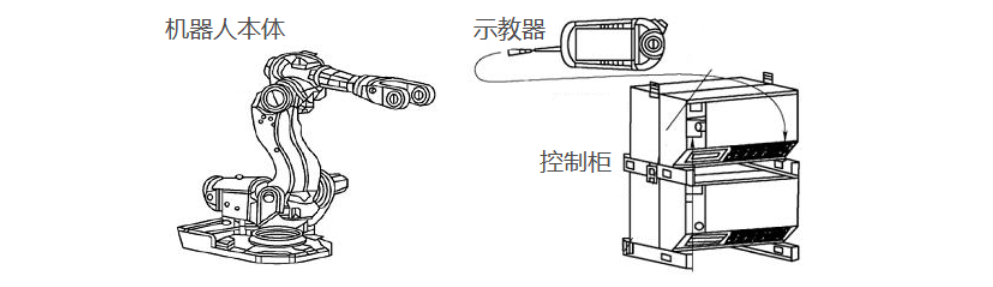
工业机器人系统组成
从内部的系统区分,由五个系统组成:机械臂连杆,控制系统、驱动系统、传动单元、传感器系统。
1、机械臂本体是工业机器人的主体部分,是用来完成各种动作的执行机构。它包括机械臂连杆、传动单元(减速机),驱动电机(伺服电机)以及内部传感器(编码器)等部分。通过六个伺服电机通过连接减速器、同步带轮等驱动六个关节轴的旋转。
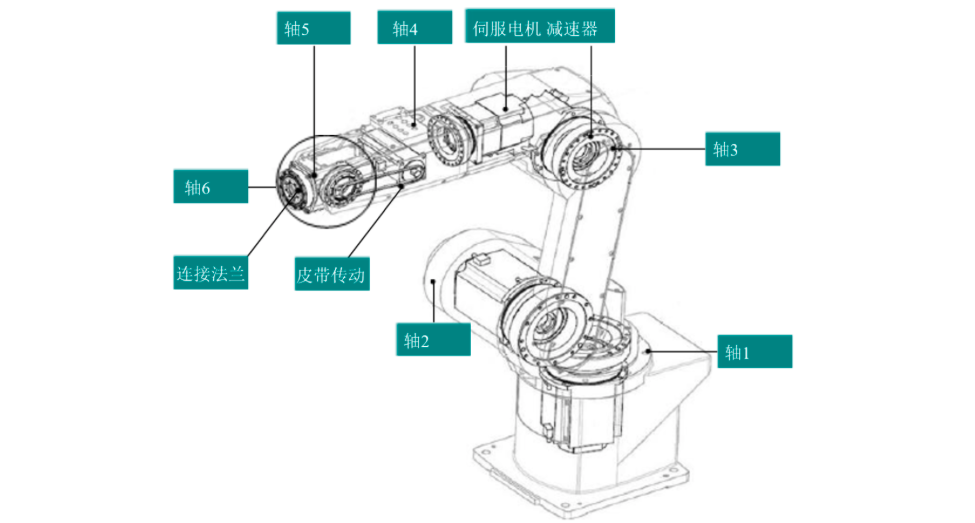
6轴关节机器人基本构造
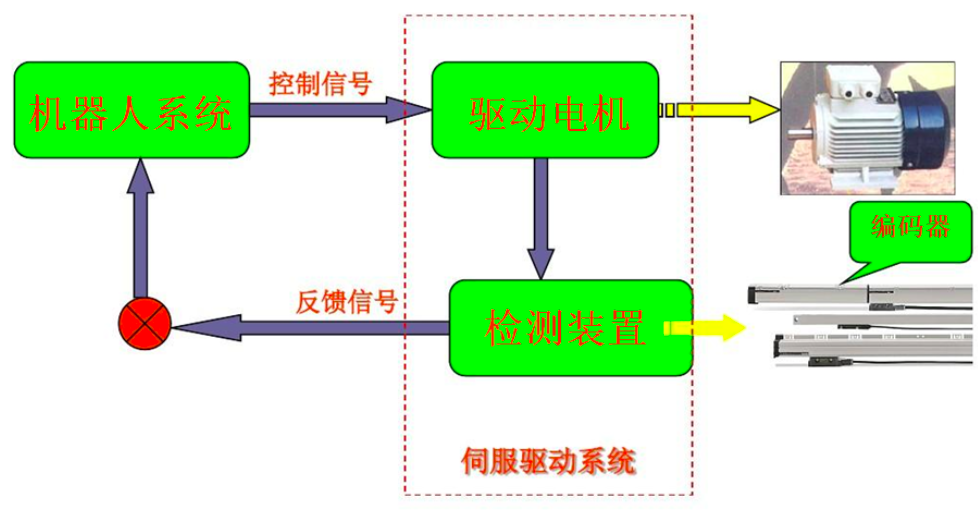
1.1 驱动系统
包含驱动器和电机,驱动器安装在控制器内,是一种将电脉冲转化为角位移的信号转换放大器,电机相当于是机械手的“肌肉”,安装在机械臂本体内。常见的驱动电机有伺服电机、步进电机。在整个机器人系统中,驱动系统是受控制器的控制。
驱动系统除电气驱动外,还有气缸及液压缸驱动等类型,目前,除个别运动精度不高、重负载或有防爆要求的机器人采用液压气压驱动外,工业机器人大多采用电气驱动,而其中属交流伺服电机应用最多,一个驱动器配一个电机控制一个关节。
1.2 传动单元
工业机器人广泛采用的机械传动单元是减速器,应用在关节型机器人上的减速器有两类:RV减速器和谐波减速器。一般将RV减速器放置在轴1-轴3等重负载的位置(主要用于20kg以上的机器人关节),谐波减速器放置在轴4-轴6等轻负载的位置(主要用于20kg以下的机器关节)。此外,机器人还采用皮带传动。
1.2.1、谐波减速器
谐波减速器主要由波发生器、柔性齿轮、柔性轴承、刚性齿轮四个基本构件组成,谐波传动减速器,是一种靠波发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动,波发生器和刚性齿轮可任选一个固定为主动件,则另一个为从动件。
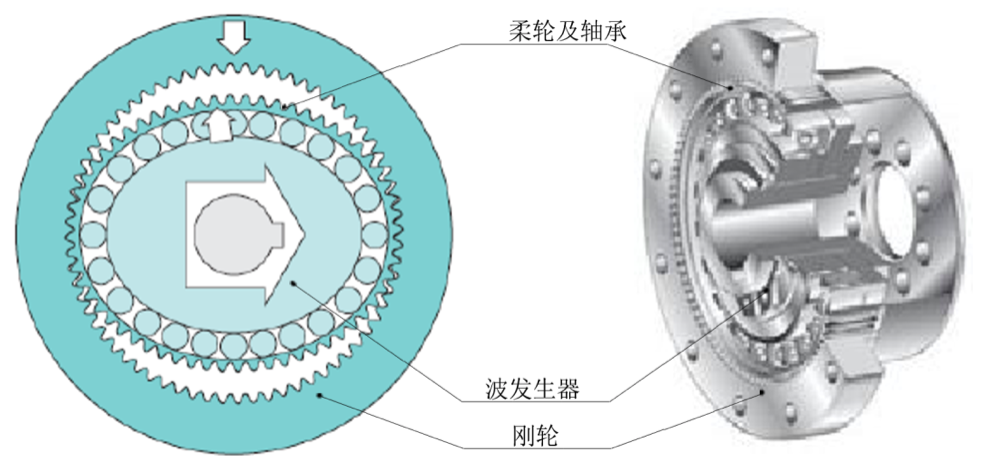
谐波减速器结构
1.2.2、RV减速器
RV减速机由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成,主要有太阳轮(中心轮)、行星轮、转臂(曲柄轴)、转臂轴承、摆线轮( RV齿轮)、针齿、刚性盘与输出盘等零部件。
RV减速器具有结构紧凑,传动比大,较高的疲劳强度和刚度以及较长的寿命,以及在一定条件下具有自锁功能的传动机械,因为回差精度稳定,高精度机器人传动多采用RV减速。
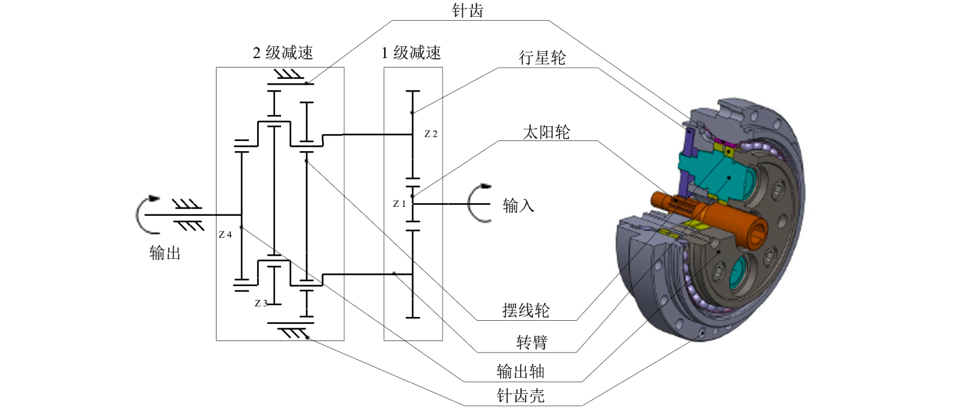
RV减速器结构
2、控制器
机器人控制器包含了控制模块、驱动模块,控制模块是由计算机主板,CPU,电源系统等部件,机器人控制软件系统是安装在控制模块内。驱动模块包含驱动器、电源系统等部件组成。
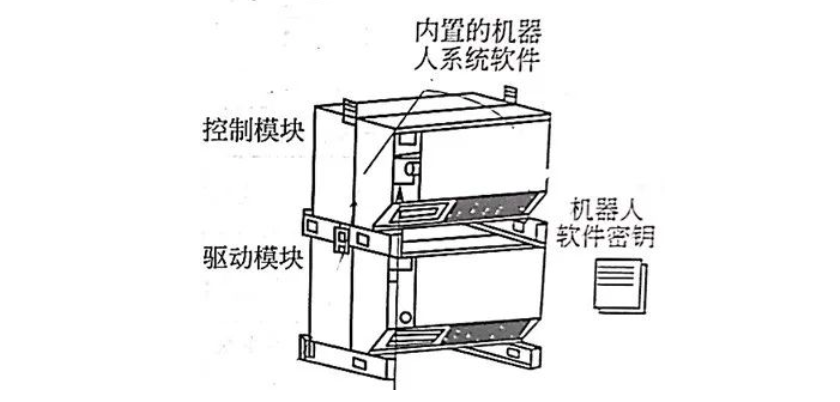
控制器组成
2.1、控制模块
控制系统是根据指令以及传感信息控制机器人完成一定动作或作业任务的,是决定机器人功能和性能的主要因素,也是机器人系统中更新和发展最快的部分,其基本功能有:示教功能、记忆功能、位置伺服功能、坐标设定功外围设备联系功能、传感器接口、故障诊断安全保护功。
2.2、传感器
用来收集机器人内部状态的信息或用来与外部环境进行通信。像人一样,机器人控制系统也需要知道每个连杆的位置才能知道机器人的总体构型。集成在机器人内的传感器(编码器)将每一个关节和连杆的信息反馈给驱动器再发送给控制系统,于是控制系统就能决定机器人的构型。机器人在工业应用也常配有许多外部传感器,例如视觉系统,力矩传感器等以使机器人能与外界进行通信。
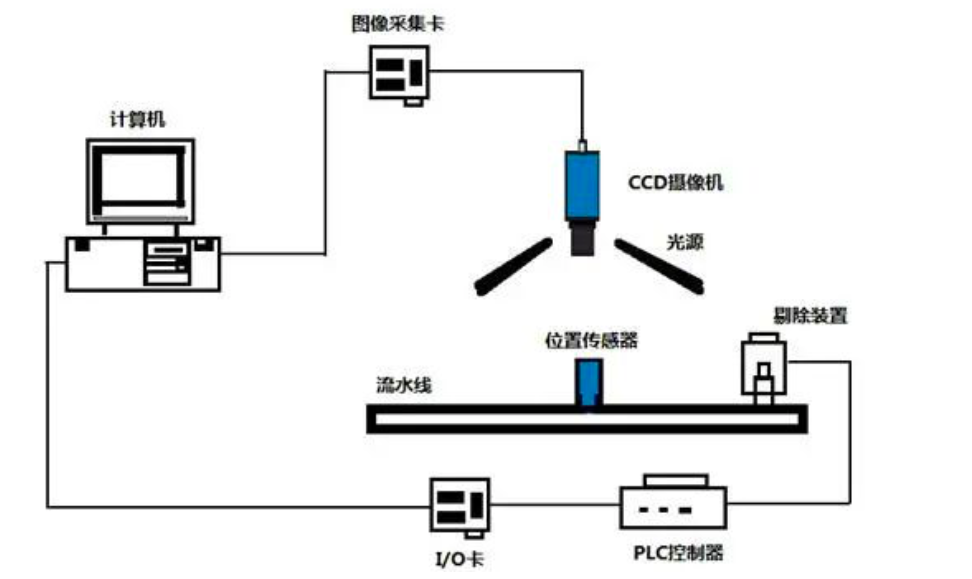
视觉系统

力传感器
3、示教器是机器人的人机交互接口,操作者可通过它对机器人进行编程或手动操纵机器人移动。

示教器
工业机器人的技术指标
机器人的技术指标反映机器人的适用范围和工作性能。一般都有:自由度、额定负载、最大工作度速和工作精度等。

自由度:物体能够对坐标系进行独立运动的数目,末端执行器的动作不包括在内。通常作为机器人的技术指标,反映机器人动作的灵活性,可使用轴的直线移动、摆动或旋转动作的数目来表示,目前,焊接和涂装作业机器人多为 6 或 7 自由度,而搬运、码垛和装配机器人多为4~6 自由度。
额定负载:正常操作条件下,作用于机器人手腕末端,不会使机器人性能降低的最大载荷。目前,使用的工业机器人负载范围可从0.3kg直至800kg。
工作精度:机器人的工作精度主要指定位精度和重复定位精度。定位精度(也称绝对精度)是指机器人末端执行器实际到达位置与目标位置之间的差异。重复定位精度(简称重复精度)是指机器人重复定位其末端执行器于同一目标位置的能力,目前,工业机器人的重复精度可达± 0.01~ ± 0.5mm 。依据作业任务和末端持重不同,机器人重复精度亦不同。
工作空间:称为工作范围、工作行程。工业机器人执行任务时,其手腕参考点所能掠过的空间,常用图形表示。目前,单体工业机器人本体的工作范围可达3.5 m 左右。
最大工作速度 :在各轴联动情况下,机器人手腕中心所能达到的最大线速度。这在生产中是影响生产效率的重要指标。
本文来源于网络,本着学习交流的目的进行转载,已标注原始作者和出处,如存在异议,请联系editor@xingongye.cn。如您对内容有疑问,请告之,以便我们及时处理。
暂无评论,等你抢沙发

美云智数魏晓刚:解析产业集群数字化转型两大模式及推进思路
中小企业数字化转型框架与总路线图